プラットフォームソフトウェアセットアップ
ブートローダーファームウェアのフラッシュ手順(QSPI)
ファームウェアは通常の動作中に更新されることが多いため、ブートローダーの更新は通常不要です。ただし、ブートローダーのフラッシュ手順は以下に記載されています。
| ファイル名 | 詳細 |
|---|---|
| DEF_XENO_R2L100_DDR4_2GB_1PCS.mot | RAMにダウンロードされ、フラッシュプログラミングに使用されるフラッシュライターイメージ。 |
| XENO_R2L100_bl2_bp.srec | QSPIフラッシュにプログラムされるBL2ステージブートローダーイメージ。 |
| XENO_R2L100_fip.srec | QSPIフラッシュにプログラムされる結合TF-AとU-Bootイメージ。 |
ステップバイステップの手順:
-
必要なソフトウェアのダウンロード
- Eoxysダウンロードポータルから最新のブートローダーとカーネルイメージパッケージをダウンロードします。
- 開発PCの作業フォルダーにすべてのファイルを展開します。
-
ハードウェアの接続
- Type-Cケーブル(デバッグUART)
- +12 V電源アダプター(≥ 2 A)
-
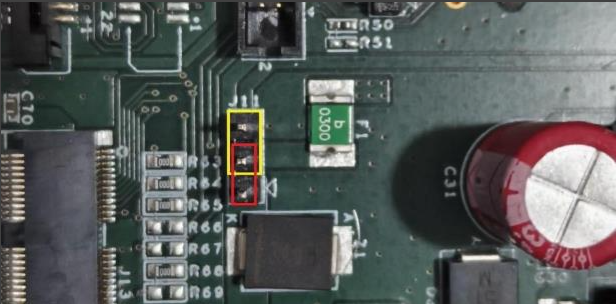
電源アダプターが利用できない場合は、J11ピン2と3の間にジャンパーを配置します(図の黄色い強調ボックスを参照)。この設定では、ボードはUSB接続を通じて5V電源を受け取ります。
-
外部電源アダプターを使用する場合は、J11ピン1と2の間にジャンパーを配置し(図の赤い強調ボックスを参照)、ボードに+12V DC電源を接続します
-
シリアルターミナルの設定
次のパラメーターでシリアルターミナルアプリケーションを設定します:- ボーレート:115200 bps
- データビット:8ビット
- パリティ:なし
- ストップビット:1ビット
- フロー制御:なし
-
SCIFダウンロードモードの有効化
以下の図に示すように、SW2ブートスイッチをSCIFダウンロード設定に設定します。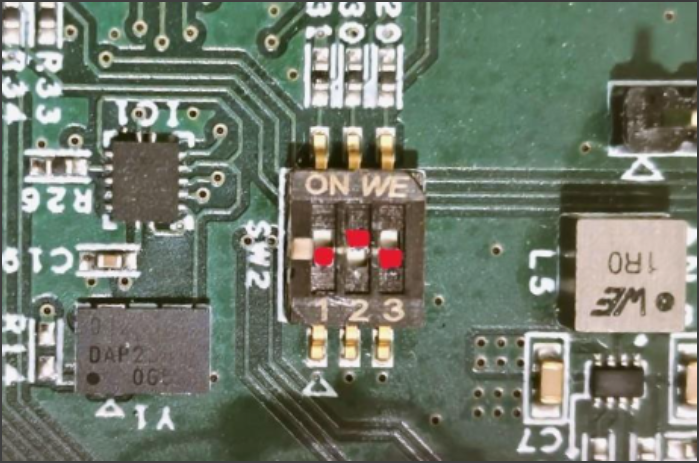
-
ダウンロードモードへの移行
上記の設定が完了したら、リセットボタン(S1)を押します。SCIFダウンロードモードを示すステータスメッセージがシリアルターミナルに表示されます。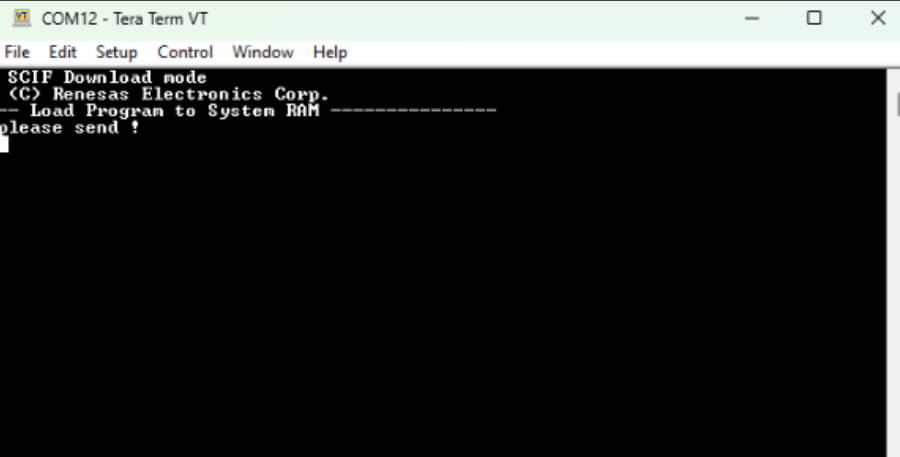 備考
備考注意 Linuxの開発システムを使用する場合は、シリアルコンソールを開く前に次の手順を実行します:
-
シリアルデバイスの識別:

-
権限の付与:

-
通信の開始:

-
-
フラッシュライターをRAMにダウンロード
- ボードをパワーオン(SW1)します。
- ターミナルにダウンロードプロンプトが表示されるまで待ちます。
- シリアルターミナルを通じてフラッシュライターイメージを送信します。
- ファイルを使用します:DEF_XENO_R2L100_DDR4_2GB_1PCS.mot。
- Tera Term:
ファイル → ファイル送信 → イメージを選択 → 開く
イメージ転送が完了すると、フラッシュライターが自動的に起動し、以下に示すプロンプトが表示されます

Linux開発PCを使用する場合は、シリアルインターフェースを通じてフラッシュライターイメージを転送するために別のターミナルウィンドウを開きます。
catコマンドを使用してイメージファイルを検出されたシリアルデバイス(ttyUSB0)に送信します。

-
ブートローダープログラミング(QSPIフラッシュ)
XENO_R2L100ボードでシステムブートを有効にするために、2つのブートローダーイメージをQSPIフラッシュにプログラムする必要があります。A. シリアル転送速度の増加

フラッシュライターは高速通信に切り替わります。
ターミナルのボーレートを115200 bpsから921600 bpsに変更し、Enterを押して続行しますB. ブートローダーステージ2(BL2)のプログラミング

プロンプトが表示されたら次の値を入力します:
パラメーター 値 プログラムロードアドレス 11E00 QSPIセーブアドレス 00000 ターミナルに「please send!」と表示されたら、ファイルを転送します

確認が求められたら入力します:

C. ファームウェアイメージパッケージ(FIP)のプログラミング
コマンドを再実行します:パラメーター 値 プログラムロードアドレス 00000 QSPIセーブアドレス 1D200 
確認が求められたら入力します
D. デフォルト速度の復元
両方のイメージが書き込まれた後:- ターミナル速度を115200 bpsに戻します
- SW1を使用してボードの電源を切ります
ブートローダープログラミングの概要:
ファイル名 RAMロードアドレス QSPIアドレス XENO_R2L100_bl2_bp.srec 0x11E00 0x00000 XENO_R2L100_fip.srec 0x00000 0x1D200 -
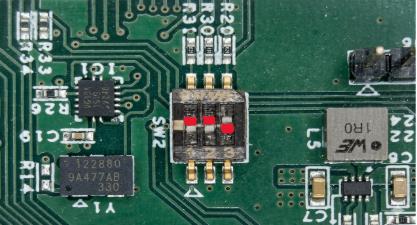
通常ブートモードへの変更 SW2ブートスイッチを以下の図に示すようにSPI(QSPI)ブート設定に設定します。
SW1を使用してボードをパワーオンし、リセットボタン(S1)を押します。 リセット後、シリアルターミナルに以下のような起動メッセージが表示されることを確認します:
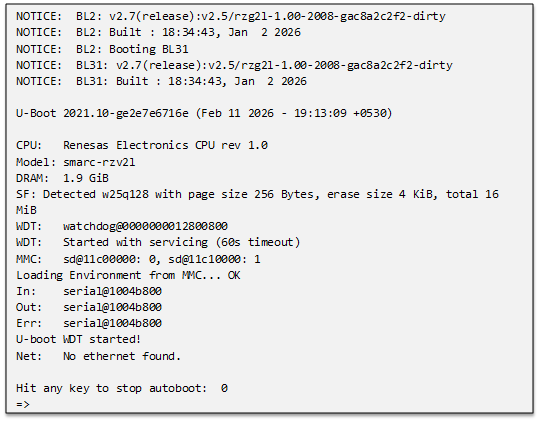
U-Bootプロンプト(=>)の表示は、ブートローダーが正しくプログラムされ、システムがQSPIフラッシュから起動していることを確認します。
Linuxシステムイメージのフラッシュ手順
XENO-R2L100プラットフォームのLinuxシステムイメージは、USBストレージデバイスを使用してロードできます。システムが正常に起動したら、カーネル、デバイスツリー、ルートファイルシステムを恒久的な動作のためにオンボードeMMCストレージにコピーできます。
USBデバイスからLinuxをブート
このセクションでは、USBフラッシュドライブを使用してXENO_R2L100プラットフォームをブートする手順を説明します。USBデバイスには、以下に説明するように準備されたLinuxカーネル、デバイスツリー、ルートファイルシステムが含まれている必要があります
-
USBブートデバイスの準備
このセクションでは、XENO_R2L100プラットフォームをブートするためのUSBフラッシュドライブの準備方法を説明します。 USBデバイスには2つのパーティションが必要です:FAT32 → カーネルとデバイスツリーファイル
EXT4 → ルートファイルシステム1.1 必要なイメージのダウンロード
A. Eoxysダウンロードポータルから最新のカーネル、デバイスツリー、ルートファイルシステムパッケージをダウンロードします。
B. 開発PCの作業ディレクトリにファイルを展開します。例:

| ファイル名 | 説明 |
|---|---|
| Image-XENO_R2L100.bin | Linuxカーネルイメージ |
| r9a07g054l2-XENO_R2L100.dtb | デバイスツリーファイル |
| core-image-weston-smarc-XENO_R2L100.bz2 | ルートファイルシステム |
1.2 Linux PCを使用したUSBパーティションの作成
-
USBドライブを挿入してデバイスを識別します

USBデバイスは/dev/sdbと仮定します。 -
既存のパーティションのアンマウント

-
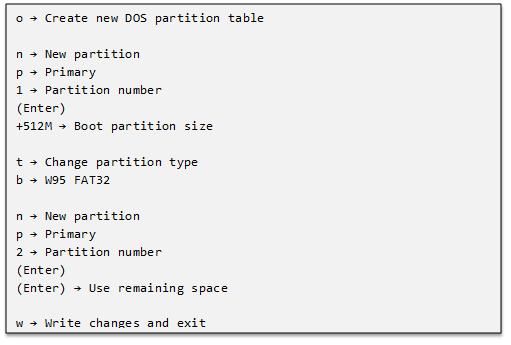
新しいパーティションテーブルの作成

fdisk内で以下を入力します:
パーティションテーブルの更新:

確認:
期待されるレイアウト:

-
パーティションのフォーマット
FAT32ブートパーティションのフォーマット

RootFSパーティションのフォーマット

-
ブートファイルのコピー(FAT32パーティション)

確認:
![]()
アンマウント:
![]()
- ルートファイルシステムの展開(EXT4パーティション)
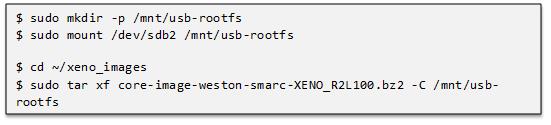
確認:
![]()
期待されるフォルダー:
![]()
- USBドライブのファイナライズ

USBドライブの準備が完了しました。
デバイスはUSBブート設定の準備ができています。
-
USBからブートするためのU-Bootの設定
USBドライブを準備した後、USBペンドライブをボードのUSBホストポートに挿入し、USBデバイスからシステムをブートするようにU-Boot環境を設定します。
システムが電源オンされると、次のプロンプトで自動ブートプロセスを停止します:
次のコマンドを実行します:
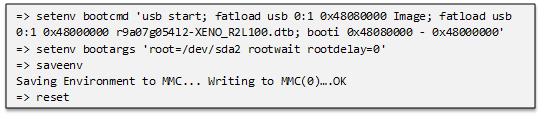
ブートの確認:
リセットコマンドを実行した後、ボードが再起動してUSBデバイスからブートを開始します。シリアルターミナルに以下のようなメッセージが表示されます:
ブートログ(参照出力)

LinuxシステムをeMMCにインストール
このセクションでは、XENO-R2L100プラットフォームのオンボードeMMCストレージにLinuxシステムイメージをインストールする方法を説明します。
システムはまずセクション12.2.1で説明されているUSBブート方法を使用してブートされる必要があります。Linuxにログインした後、カーネル、デバイスツリー、ルートファイルシステムをeMMCストレージにコピーして単独で動作させることができます。
- USBを使用してシステムをブート
準備されたUSBストレージデバイスを挿入し、セクション12.2.1で説明されているようにシステムをブートします。
ブートプロセスが完了すると、Linuxログインプロンプトが表示されます:
![]()
rootとしてログインします。
- eMMCデバイスの識別
利用可能なストレージデバイスを確認します:
![]()
典型的な出力:

- eMMCパーティションの作成
fdiskを使用してeMMCデバイスにパーティションを作成します。
![]()
fdisk内で2つのパーティションを作成します:

レイアウトの例:

- eMMCパーティションのフォーマット
ブートパーティションのフォーマット:
![]()
ルートファイルシステムパーティションのフォーマット:
![]()
- ブートファイルをeMMCにコピー
ブートパーティションのマウント:

USBからカーネルとデバイスツリーファイルをコピー:

パーティションのアンマウント:
![]()
- ルートファイルシステムのコピー
eMMCルートパーティションのマウント:

USBルートパーティションからファイルシステムをコピー:
![]()
パーティションのアンマウント:
![]()
- eMMCからブートするためのU-Bootの設定
ボードを再起動してU-Bootプロンプトで停止します。
ブートパラメーターを設定します:

ブートの確認:
再起動後、システムはeMMCストレージからカーネルとルートファイルシステムをロードします。
ログインプロンプトがシリアルコンソールに表示されます:
![]()
ボードはオンボードeMMCから直接Linuxを起動するように設定されました。